Crear tareas
- Inicie la aplicación AdminClient y abra el módulo Tareas.
- En el árbol de proyectos, seleccione un componente ABB IRC5.
- Haga clic en el botón Crear de la barra de menús o arrastre y suelte el componente en el área Tareas.
- Compruebe si en la sección Configuración de tareas, aparece el tipo de carga ABB Robotics .
- Configure las siguientes secciones: General, Notificación, Carga y comparación y Crear versiones automáticamente al finalizar la ejecución de tareas. Las secciones Notificación y Crear versiones automáticamente al finalizar la ejecución de tareas están disponibles una vez que se realizaron las configuraciones previas.
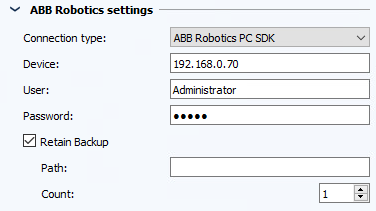
- Configure la Sección Configuraciones ABB Robotics:
-
Seleccione un tipo de conexión.
-
Para las tareas con el tipo de conexión ABB Robotics PC SDK se crea una nueva copia de seguridad durante la ejecución de la tarea en el servidor.
-
Para las tareas con el tipo de conexión FTP la última copia de seguridad que está disponible en el Robot se copia en el servidor.
-
- Asigne en Dispositivo la dirección IP o el nombre del robot para el cual la tarea debe ser ejecutada.
- Complete los campos Usuario y Contraseña con los datos que usa versiondogpara iniciar sesión en el robot para ejecutar la tarea.
- Si seleccionó como tipo de conexión ABB Robotics PC SDK, realice las siguientes configuraciones:
Active la casilla de control Conservar copia de seguridad, si quiere conservar las copias de seguridad en el robot.
- En Ruta, asigne el subdirectorio en donde el robot crea las copias de seguridad.
 El subdirectorio puede ser configurado directamente en el robot. Para ello use las instrucciones del fabricante
El subdirectorio puede ser configurado directamente en el robot. Para ello use las instrucciones del fabricante - En Cantidad, asigne la cantidad de copias de seguridad que quiere almacenar. Es posible retener de una a cinco copias de seguridad.
- Si seleccionó el tipo de conexión FTP, realice las siguientes configuraciones:
- Asigne el puerto a través del cual versiondog accede al robot.
- Active de ser necesario la casilla Usar FTP en modo pasivo.
- En Subdirectorio asigne el subdirectorio en donde el robot crea las copias de seguridad El subdirectorio puede ser configurado directamente en el robot. Para realizar este paso, remítase a las instrucciones de ABB.
En Avanzado, introduzca el Tiempo de espera entre paquetes de datos (en ms) y el Tamaño máximo de los paquetes de datos (en KB). Active la casilla de control Ejecutar la carga solo cuando la etiqueta de tiempo y hora difiere (reduce la carga de red) para que durante la carga se compruebe la etiqueta de fecha y hora, en vez de los contenidos.
-
Guarde los cambios y ejecute la tarea.
Si todavía no se versionaron datos del proyecto en el componente, seleccione la estrategia de comparación Copia de seguridad anterior <-> Copia de seguridaden Carga y comparación.
Puede realizar más configuraciones para las tareas de este tipo de carga en el AdminClient, en el cuadro de diálogo Configuración global de la tarea.
| Contenido relacionado |
|---|
| Acerca de versiondog -> Tarea |
| AdminClient -> Configuraciones de las tareas |
| Integrar proyectos |
| AdminClient -> Configuraciones avanzadas de las tareas |